
- 22 ม.ค. 2560 14:34:16
- ไฟฟ้าอิเล็คทรอนิกส์
สเต็ปเปอร์มอเตอร์
อุปกรณ์แม่เหล็กไฟฟ้าที่นักอิเล็กทรอนิสก์รู้จักกันเป็นอย่างดีย่อมต้องมีชื่อของ มอเตอร์ อยู่ในสาระบบอย่างแน่นอน มอเตอร์ที่ได้รับความนิยมอย่างมากในแวดวงคนทำหุ่นยนต์และกลไกเคลื่อนไหวก็คือ มอเตอร์ไฟตรงที่มีชุดเฟืองทดหรือบางทีเรียกชุดเฟืองขับมอเตอร์หรือมอเตอร์เกียร์บ็อก, เซอร์โวมอเตอร์ และสเต็ปเปอร์มอเตอร์
คุณสมบัติเด่นของสเต็ปเปอร์มอเตอร์
• มุมในการหมุน (rotation angle) มีค่าตามสัดส่วนของจำนวนของพัลส์อินพุตที่ใช้ขับมอเตอร์
• ความเร็วในการหมุน (rotation speed) มีค่าตามสัดส่วนและสัมพันธ์กับความถี่ของสัญญาณพัลส์อินพุตที่ใช้ขับมอเตอร์
• ใช้ในการควบคุมตำแหน่งแบบระบบเปิดที่มีความแม่นยำสูง โดยไม่มีต้องใช้สัญญาณป้อนกลับของการกำหนดตำแหน่ง
• ไม่มีความผิดพลาดสะสมของการกำหนดตำแหน่ง
• เหมาะกับงานที่ต้องการกลไกเคลื่อนที่ความเร็วต่ำ แรงบิดสูง โดยไม่ต้องใช้ระบบเฟืองทดรอบเพิ่มเติม
• สามารถกำเนิดและรักษาแรงบิดได้ในทันทีที่มอเตอร์ถูกกระตุ้นให้ทำงาน
• สามารถรักษาสภาวะการหมุนของแกนได้โดยไม่ทำให้มอเตอร์เสียหาย
• ไม่มีแปรงถ่าน ทำให้มีอายุการใช้งานที่ยาวนาน
• มีลูกปืนความเที่ยงตรงสูง เพื่อช่วยการหมุนของแกนมีความแม่นยำ
ข้อด้อยของสเต็ปเปอร์มอเตอร์
• การกำทอนหรือการเกิดเรโซแนนซ์ทำให้ไม่สามารถควบคุมการทำงานของสเต็ปเปอร์มอเตอร์ได้
• การทำให้มอเตอร์สามารถหมุนแกนด้วยความเร็วสูงทำได้ยาก
• หากเกิดแรงบิดสูงสูงเกินกว่าที่รับได้หรือเกิดโอเวอร์ทอร์กมอเตอร์จะสูญเสียการรับรู้ตำแหน่งของแกนหมุน จะต้องกลับไปเริ่มต้นการอินิเชียลใหม่
• ให้แรงบิดที่น้อยกว่ามอเตอร์ไฟตรงและมอเตอร์ไฟสลับที่ขนาดของตัวมอเตอร์เท่ากัน
สเต็ปเปอร์มอเตอร์เป็นมอเตอร์ที่มีลักษณะการทำงานแตกต่างจากมอเตอร์ทั่วไป เพราะจะต้องป้อนสัญญาณเป็นพัลส์ให้แก่ขดลวดของมอเตอร์เป็นจังหวะอย่างเหมาะสม และการหมุนของมอเตอร์ชนิดนี้จะหมุนเป็นจังหวะตามพัลส์ที่ป้อนเข้ามา หากมีการป้อนสัญญาณพัลส์ต่อเนื่อง มอเตอร์ก็จะสามารถหมุนได้อย่างต่อเนื่องเหมือนกับมอเตอร์ไฟตรงปกติ ดังนั้นด้วยจังหวะในการป้อนสัญญาณพัลส์จึงทำให้ผู้ควบคุมสามารถเลือกตำแหน่งที่ต้องการให้มอเตอร์หยุดหมุนได้
จังหวะการหมุนของสเต็ปเปอร์มอเตอร์เรียกว่า สเต็ป (step) นั่นจึงเป็นที่มาของชื่อของมอเตอร์ชนิดนี้ความละเอียดของมอเตอร์กำหนดเป็นองศาที่หมุนไปในหนึ่งสเต็ป หากมอเตอร์มีจำนวนองศาต่อสเต็ปมาก หมายความว่า มอเตอร์ตัวนี้มีควาละเอียดของการหมุนต่ำ ยกตัวอย่าง การหมุนครบ 1 รอบเท่ากับ 360 องศา หากมอเตอร์มีสเต็ปการหมุนเท่ากับ 7.5 องศาต่อสเต็ป มอเตอร์ตัวนี้มีความละเอียดของการหมุนเท่ากับ 48 ตำแหน่ง แต่ถ้าหากมีสเต็ปการหมุนกับ 1.8 องศาต่อสเต็ป ความละเอียดของการหมุนเท่ากับ 200 จะเห็นได้ว่ามอเตอร์ตัวหลังมีความละเอียดสูงกว่าตัวแรกมาก ทำให้นำมาใช้ในงานที่ต้องการกำหนดตำแหน่งได้ดีกว่า แม่นยำกว่า ผนวกเข้ากับวงจรขับแบบครึ่งสเต็ป ความละเอียดของการหมุนจะเพิ่มขึ้นอีก 2 เท่า ทำให้มีความละเอียดของการหมุนกลายเป็น 400 ตำแหน่ง
ขนาดของสเต็ปเปอร์มอเตอร์ที่มีการผลิตและจำหน่ายในท้องตลาด มีตั้งแต่ขนาดแรงดันต่ำ 3V ไปจนถึง 24V และ 48V ส่วนขนาดของกระแสมีตั้งแต่ไม่กี่สิบมิลลิแอมป์อันเป็นสเต็ปเปอร์มอเตอร์ตัวเล็กไปจนถึงเป็นสิบแอมป์ ซึ่งมีขนาดของมอเตอร์ใหญ่โตขึ้นตามลำดับ ราคาอยู่ในหลักเป็นร้อยบาทขึ้นไปสำหรับของใหม่
ชนิดของสเต็ปเปอร์มอเตอร์
ในอดีตมีการแบ่งชนิดของสเต็ปเปอร์มอเตอร์ตามลักษณะโครงสร้างซึ่งแบ่งได้เป็น 3 ชนิดคือ แบบแม่เหล็กถาวรหรือ PM (Permanent Magnet), แบบปรับค่าความต้านทานแม่เหล็กได้หรือ VR (Variable Reluctance) และแบบผสมหรือไฮบริด (Hybrid) ซึ่งเป็นการผสมกันระหว่างแบบ PM และ VR ในปัจจุบันนี้สเต็ปเปอร์มอเตอร์ส่วนใหญ่เป็นแบบไฮบริด เนื่องจากสามารถทำให้มีความละเอียดในการเคลื่อนที่ของแกนได้สูงถึง 0.9 องศาต่อสเต็ป (ซึ่งเป็นข้อดีของแบบ VR) และให้แรงบิดหรือทอร์กที่สูง โดยใช้พลังงานต่ำ (เป็นข้อดีของแบบ PM) ในรูปที่ 1 แสดงโครงสร้างอย่างง่ายของสเต็ปเปอร์มอเตอร์แบบไฮบริด
ดังนั้นการกำหนดชนิดของสเต็ปเปอร์มอเตอร์ในยุคต่อมาจนถึงปัจจุบันจึงพิจารณาที่ลักษณะของการพันขดลวด, การต่อสายออกมาใช้งาน และวงจรขับ ซึ่งแบ่งเป็น 2 ชนิดหลักๆ คือ ชนิดไบโพลาร์ (bipolar) และชนิดยูนิโพลาร์ (uni-polar)
สเต็ปเปอร์มอเตอร์แบบไบโพล่าร์

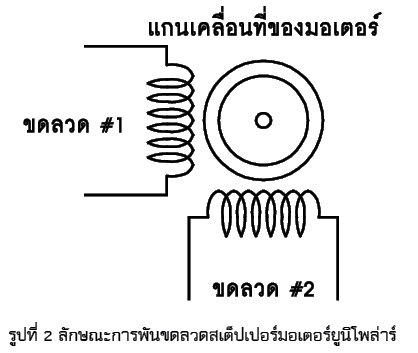
ดังนั้นการกำหนดชนิดของสเต็ปเปอร์มอเตอร์ในยุคต่อมาจนถึงปัจจุบันจึงพิจารณาที่ลักษณะของการพันขดลวด, การต่อสายออกมาใช้งาน และวงจรขับ ซึ่งแบ่งเป็น 2 ชนิดหลักๆ คือ ชนิดไบโพลาร์ (bipolar) และชนิดยูนิโพลาร์ (uni-polar) สเต็ปเปอร์มอเตอร์แบบไบโพล่าร์ มีลักษณะการพันขดลวดของมอเตอร์แสดงในรูปที่ 2 แบ่งออกเป็น 2 ขดที่ไม่มีแท็ปกลาง ทำให้บางครั้งจึงเรียกสเต็ปเปอร์มอเตอร์แบบนี้ว่า เป็นสเต็ปเปอร์มอเตอร์แบบ 2 เฟส การขับให้มอเตอร์แบบนี้หมุนจะต้องป้อนแรงดันต่างขั้วกันให้แก่ขดลวดแต่ละขด ทำให้วงจรขับสเต็ปเปอร์มอเตอร์แบบนี้ค่อนข้างซับซ้อน
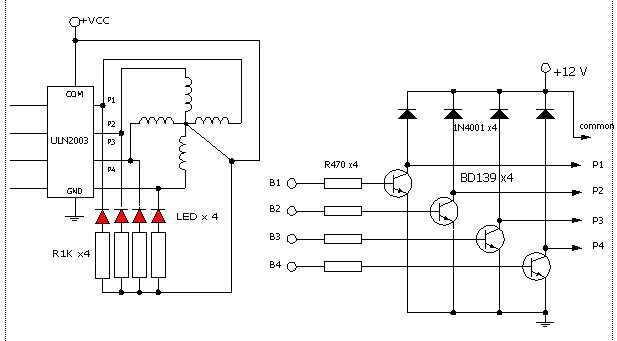
การกระตุ้นและควบคุมการหมุนของสเต็ปเปอร์มอเตอร์แบบยูนิโพล่าร์
การกระตุ้นและควบคุมการหมุนของมอเตอร์ให้เคลื่อนที่ไปแต่ละสเต็ปทำได้โดยจ่ายกำลังไฟฟ้าไปยังขดลวดแต่ละขดบนสเตเตอร์ ซึ่งต้องป้อนเป็นแบบซีเควนเชียลในรูปแบบที่ถูกต้องด้วย สามารถแบ่งได้เป็น 3 รูปแบบคือ แบบเวฟ (wave) หรือแบบฟูลเต็ป 1 เฟส (full step 1-phase), แบบฟูลสเต็ป 2 เฟส และแบบครึ่งสเต็ป (half step)
การกระตุ้นสเต็ปเปอร์มอเตอร์แบบเวฟหรือฟูลสเต็ป 1 เฟส
เป็นการกระตุ้นที่มีรูปแบบง่ายที่สุด โดยทำการกระตุ้นขดลวดทีละขดในเวลาหนึ่งไล่เรียงถัดกันไป เช่น เริ่มต้นที่ขดที่ 1, 2, 3, 4 แล้ววนกลับมาขดที่ 1 วนไปเรื่อยๆ หรือเริ่มที่ขดที่ 1 แล้วย้อนไปยังขดที่ 4, 3, 2 แล้วกลับมายังขดที่ 1 อีกครั้ง ซึ่งทำให้ทิศทางของการหมุนสวนกัน ในการกระตุ้นรูปแบบนี้จึงมีขดลวดเพียงขดเดียวในเวลาหนึ่งที่ถูกกระตุ้นเท่านั้น วงจรกระตุ้นแบบนี้มีราคาถูกและง่าย ขั้นตอนการทำงานต่างๆ แสดงดังในตารางที่ 1
การกระตุ้นแบบฟูลสเต็ป 2 เฟส
เป็นการกระตุ้นซึ่งคล้ายกับแบบฟูลสเต็ปหนึ่งเฟส แต่การกระตุ้นแบบนี้จ่ายกำลังไฟฟ้าไปที่ขดลวด 2 ขดที่อยู่ใกล้กันในเวลาเดียวกัน และเรียงถัดกันไปเช่นเดียวกับแบบฟูลสเต็ป 1 เฟส ดังตัวอย่าง ขดลวดชุดแรกที่ถูกกระตุ้นจะเป็นขดที่ 1 และ 2 ตามด้วยการกระตุ้นขดที่ 2 และ 3 ต่อไปเป็นขดที่ 3 และ 4 ถัดไปเป็นขดที่ 4 และ 1 แล้วกลับมาที่ขดที่ 1 และ 2 วนไปตามลำดับเช่นนี้ หรือเริ่มที่ขด 1 และ 4 ตามด้วยขดที่ 4 และ 3 ถัดไปเป็นขดที่ 3 และ 2 ต่อไปเป็นขดที่ 2 และ 1 แล้ววนกลับมาที่ขดที่ 1 และ 4 ทิศทางการหมุนจะสวนทางกัน การกระตุ้นสเต็ปเปอร์มอเตอร์แบบนี้สามารถเพิ่มแรงบิดได้มากกว่าแบบฟูลสเต็ป 1 เฟส โรเตอร์จะเคลื่อนที่ด้วยแรงดึงอย่างเต็มแรงจาก 2 ขดลวดที่ถูกกระตุ้นพร้อมกัน และเคลื่อนที่ต่อไปด้วยแรงดึงจากอีก 2 ขดลวดถัดไป สำหรับข้อเสียคือการกระตุ้นแบบนี้ต้องใช้กำลังไฟฟ้ามากขึ้น ขั้นตอนการทำงานต่าง ๆ แสดงดังในตารางที่ 2

การกระตุ้นแบบครึ่งสเต็ปหรือฮาล์ฟสเต็ป
เป็นรูปแบบที่ผสมผสานระหว่างการกระตุ้นแบบฟูลสเต็ป 1 และ 2 เฟส เพื่อเพิ่มจำนวน ของสเต็ปต่อรอบอีกเท่าตัวหนึ่ง ในระบบนี้จะกระตุ้นขดลวดเรียงกันไปเป็นลำดับดังนี้ เริ่มจากขดลวดที่ 1, 1 และ 2, 2, 2 และ 3, 3, 3 และ 4, 4, 4 และ 1 แล้ววนกลับมายังขดลวดที่ 1
แรงบิดที่ได้จากการกระตุ้นแบบนี้จะเพิ่มมากขึ้นอีก เพราะช่วงสเต็ปมีระยะสั้นลง แต่ละสเต็ปเกิดแรงดึงจากขดลวด 2 ขดที่ถูกกระตุ้นพร้อมกัน ความถูกต้องของตำแหน่งมีเพิ่มมากขึ้น แต่ต้องพึงระวังไว้อีกประการหนึ่งว่าเมื่อกระตุ้นให้ทำงานในรูปแบบนี้จะต้องทำการหมุนถึง 2 สเต็ป จึงจะได้เท่ากับระยะเท่ากับ 1 สเต็ปเต็มของการควบคุมใน 2 แบบแรก สำหรับแหล่งจ่ายกำลังไฟฟ้าต้องใช้ขนาดเท่ากับแบบ 2 เฟสเป็นอย่างน้อย จึงจะเพียงพอ ขั้นตอนการทำงานต่างๆ

